被动系统的定义和特性
定义
Passivity既可以翻译为「被动性」,也可以翻译为「无源性」。在电路理论中,无源系统的说法更为常见,因为它与是否存在能量来源密切相关。而在控制理论中,被动系统的用法则更加普遍,因此本文采用「被动性」这个译名。
对于如下动态系统: \[ \dot{x}=f(x,u),\,\,y=h(x,u) \]
其中\(u\)是系统输入,\(y\)是系统输出,\(f\)是局部Lipschitz函数,\(h\)是连续函数,且有\(f(0,0)=0\)以及\(h(0,0)=0\)。动态系统被动性的定义如下:
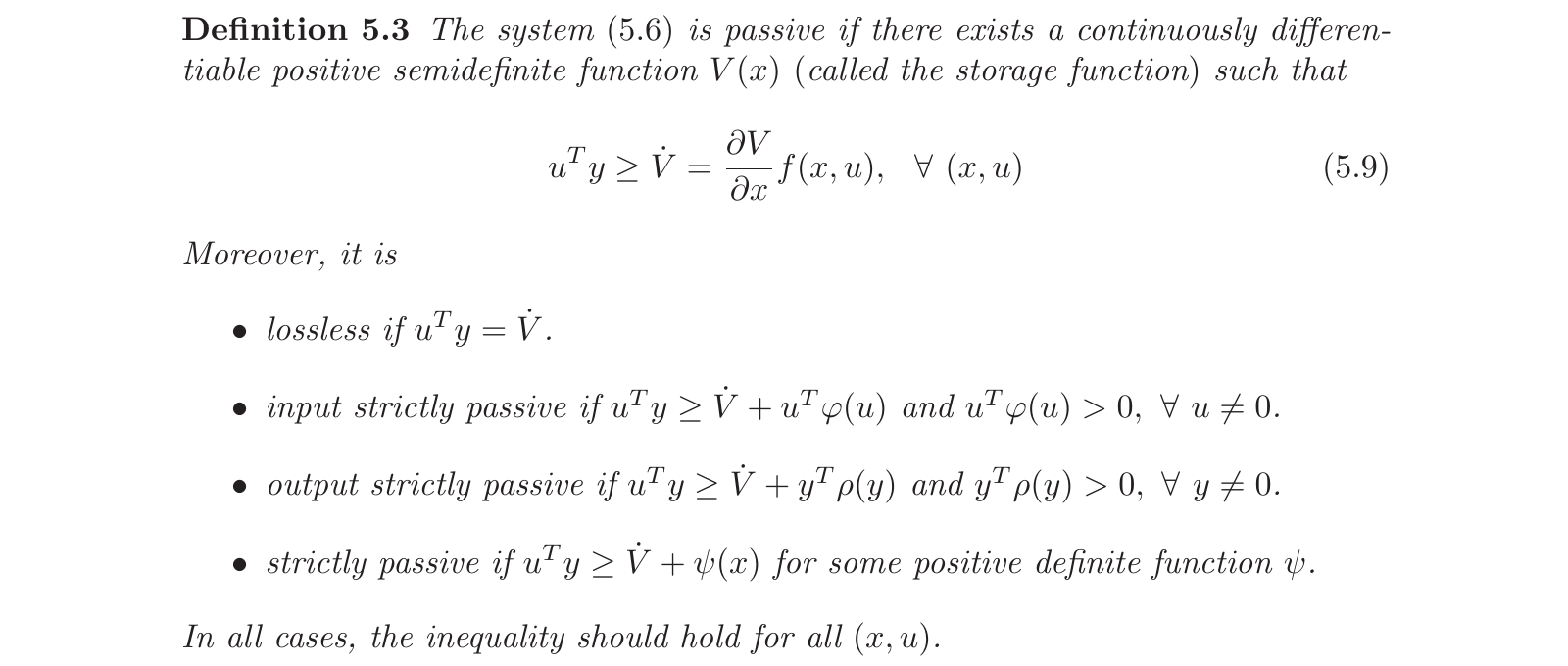
简单来说,被动性条件说明系统吸收的能量(即输入功率\(u^Ty\))不小于系统所存储能量的变化率(即存储函数\(V(x)\)的导数\(\dot{V}\)),这意味着系统不会产生能量,能量只会消耗或储存。
稳定性
对于前面的动态系统,原点是\(\dot{x}=f(x,0)\)的一个平衡点,现在分析原点的稳定性。根据被动性定义中那熟悉的记号和公式,很容易将它与系统稳定性联系到一起。
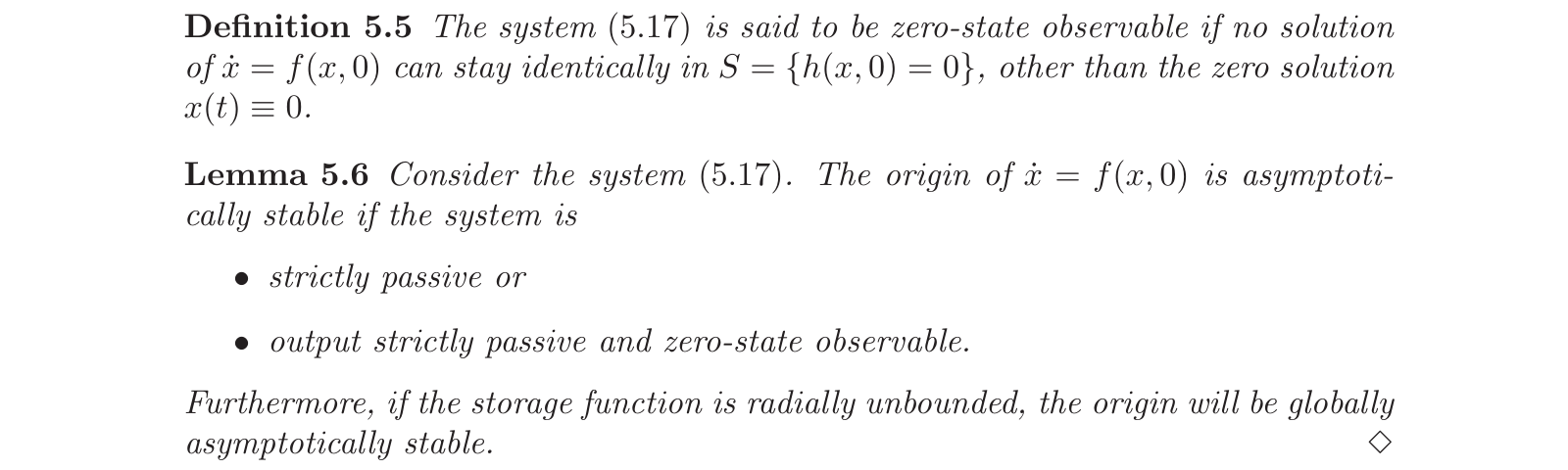
将定义中的存储函数定义为Lyapunov函数,很容易证明,若被动系统存在正定的存储函数,则它一定是稳定的:

渐进稳定性条件则更加复杂一些:
总结
通过上面的讨论可知,被动性与系统的能量传递密切相关。被动系统如果不产生能量,任何从外部输入吸收的能量要么被存储,要么消散。许多物理系统本身就是被动的(无源的),例如电路中的电阻和机械系统中的摩擦力,它们都会消耗能量。被动性常用作分析稳定性的工具。被动系统具有良好的稳定性特性,例如,被动系统的反馈互连在某些条件下是稳定的(称为「被动性定理」)。
对于线性时不变系统,可以通过传递函数的特性来检查被动性。具体来说,如果系统是被动的,则传递函数\(H(s)\)要满足某些条件,比如正实性(positive real),这意味着\(H(s)\)有实数的极点和零点,且\(H(j\omega)\)的实部对于所有频率\(\omega\)都是非负的。